



















Chapter 18 Version 1 ColdFire Debug (CF1_DEBUG)
MCF51QE128 MCU Series Reference Manual, Rev. 3
406 Freescale Semiconductor
Get the latest version from freescale.com
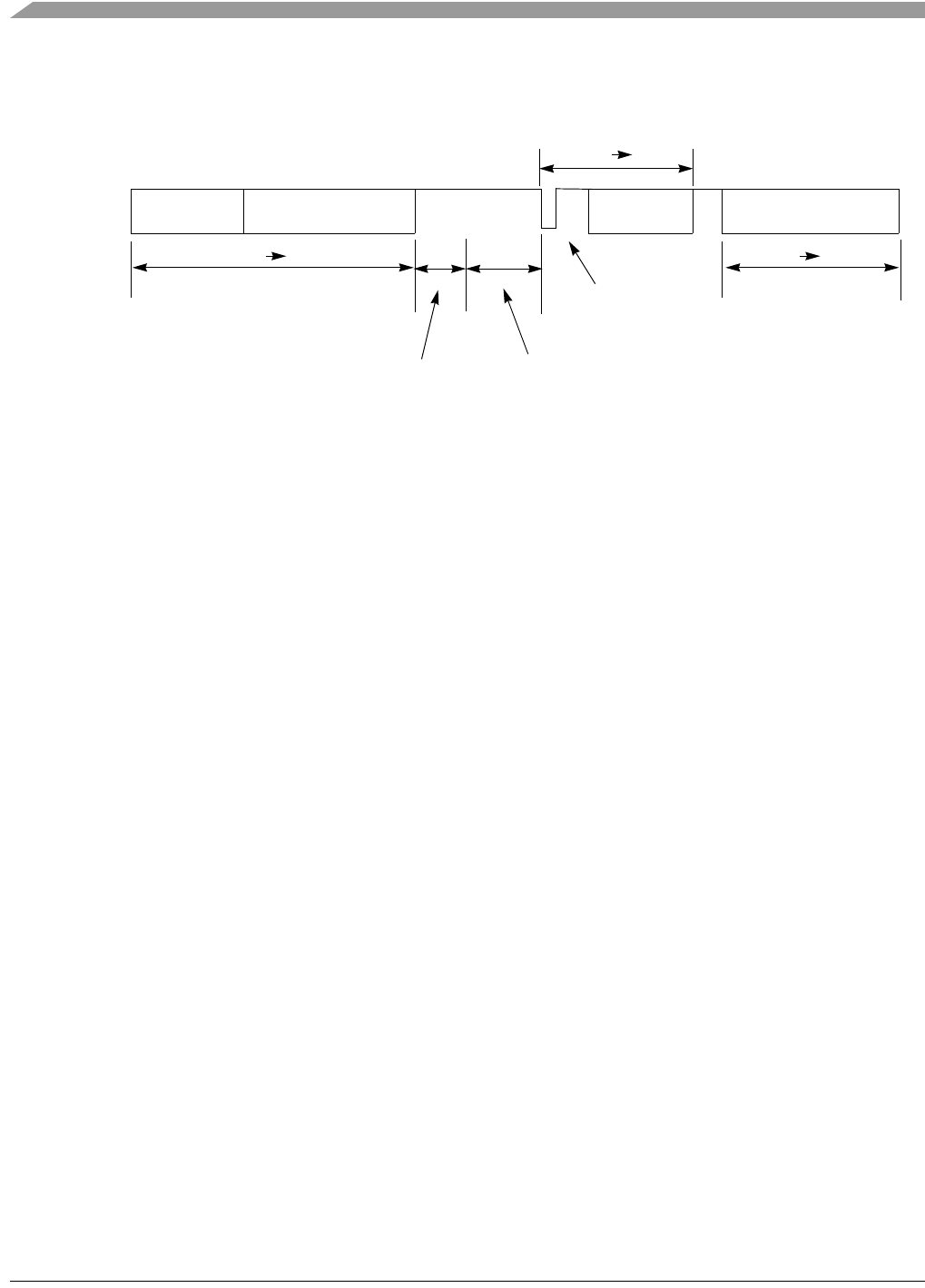
indicating that the addressed byte is ready to be retrieved. After detecting the ACK pulse, the host initiates
the data-read portion of the command.
Figure 18-20. Handshake Protocol at Command Level
Unlike a normal bit transfer, where the host initiates the transmission by issuing a negative edge in the
BKGD pin, the serial interface ACK handshake pulse is initiated by the target MCU. The hardware
handshake protocol in Figure 18-20 specifies the timing when the BKGD pin is being driven, so the host
should follow these timing constraints in order to avoid the risks of an electrical conflict at the BKGD pin.
The ACK handshake protocol does not support nested ACK pulses. If a BDC command is not
acknowledged by an ACK pulse, the host first needs to abort the pending command before issuing a new
BDC command. When the CPU enters a stop mode at about the same time the host issues a command that
requires CPU execution, the target discards the incoming command. Therefore, the command is not
acknowledged by the target, meaning that the ACK pulse is not issued in this case. After a certain time,
the host could decide to abort the ACK protocol in order allow a new command. Therefore, the protocol
provides a mechanism where a command (a pending ACK) could be aborted. Unlike a regular BDC
command, the ACK pulse does not provide a timeout. In the case of a STOP instruction where the ACK
is prevented from being issued, it would remain pending indefinitely if not aborted. See the handshake
abort procedure described in Section 18.4.1.7, “Hardware Handshake Abort Procedure.”
18.4.1.7 Hardware Handshake Abort Procedure
The abort procedure is based on the SYNC command. In order to abort a command that has not responded
with an ACK pulse, the host controller generates a sync request (by driving BKGD low for at least 128
serial clock cycles and then driving it high for one serial clock cycle as a speedup pulse). By detecting this
long low pulse on the BKGD pin, the target executes the sync protocol (see Section 18.4.1.5.1, “SYNC”),
and assumes that the pending command and therefore the related ACK pulse, are being aborted. Therefore,
after the sync protocol completes, the host is free to issue new BDC commands.
Note, since the host knows the target BDC clock frequency, the SYNC command does not need to consider
the lowest possible target frequency. In this case, the host could issue a SYNC very close to the 128 serial
clock cycles length, just providing a small overhead on the pulse length in order to assure the sync pulse
is not misinterpreted by the target.
It is important to notice that any issued BDC command that requires CPU execution is scheduled for
execution by the pipeline based on the dynamic state of the machine, provided the processor does not enter
READ_MEM.B
BDC ISSUES THE
BYTE IS
NEW BDC COMMAND
BKGD PIN
ADDRESS[23–0]
CPU EXECUTES THE
READ_MEM.B
COMMAND
RETRIEVED
HOST TARGET
HOST TARGE T
HOST TARGET
DEBUG DECODES
THE COMMAND
ACK PULSE (NOT TO SCALE)