














4 - 98
4 Setup
MITSUBISHI CNC
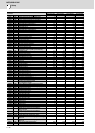
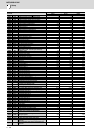
(12) Tool spindle motor HF Series
-
Motor
Parameter
Tool spindle motor HF Series
HF75 HF105 HF54 HF104 HF154 HF224 HF204 HF354
No. Abbrev. Details MDS-D2-SP- 20 20 40 40 80 80 80 160
SP001 PGV Position loop gain non-interpolation mode 15 15 15 15 15 15 15 15
SP002 PGN Position loop gain interpolation mode 33 33 33 33 33 33 33 33
SP003 PGS Position loop gain spindle synchronization 15 15 15 15 15 15 15 15
SP004 00000000
SP005 VGN1 Speed loop gain 1 30 150 90 150 150 150 150 150
SP006 VIA1 Speed loop lead compensation 1 490 1900 1150 1900 1900 1900 1900 1900
SP007 VIL1 Speed loop delay compensation 1 00000000
SP008 VGN2 Speed loop gain 2 30 150 90 150 150 150 150 150
SP009 VIA2 Speed loop lead compensation 2 490 1900 1150 1900 1900 1900 1900 1900
SP010 VIL2 Speed loop delay compensation 2 00000000
SP011 00000000
SP012 00000000
SP013 00000000
SP014 PY1 Minimum excitation rate 1 00000000
SP015 PY2 Minimum excitation rate 2 00000000
SP016 DDT Phase alignment deceleration rate 20 20 20 20 20 20 20 20
SP017 SPEC1 Spindle specification 1 400C 400C 400C 400C 400C 400C 400C 400C
SP018 SPEC2 Spindle specification 2 0000 0000 0000 0000 0000 0000 0000 0000
SP019 RNG1 Sub side encoder resolution 260 260 260 260 260 260 260 260
SP020 RNG2 Main side encoder resolution 260 260 260 260 260 260 260 260
SP021 OLT Overload detection time constant 300 300 300 300 300 300 300 300
SP022 OLL Overload detection level 100 100 100 100 100 100 100 100
SP023 OD1
Excessive error detection width
(interpolation mode - spindle synchronization)
120 120 120 120 120 120 120 120
SP024 INP In-position width 875 875 875 875 875 875 875 875
SP025 INP2 2nd in-position width 875 875 875 875 875 875 875 875
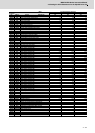
SP026 TSP Maximum motor speed 4000 4000 3000 3000 3000 3000 3000 3000
SP027 ZSP Motor zero speed 25 25 25 25 25 25 25 25
SP028 SDTS Speed detection set value 400 400 300 300 300 300 300 300
SP029 SDTR Speed detection reset width 30 30 30 30 30 30 30 30
SP030 SDT2 2nd speed detection setting value 00000000
SP031 MTYP Motor type 2200 2200 2200 2200 2200 2200 2200 2200
SP032 PTYP Power supply type/ Regenerative resistor type 0000 0000 0000 0000 0000 0000 0000 0000
SP033 SFNC1 Spindle function 1 0000 0000 0000 0000 0000 0000 0000 0000
SP034 SFNC2 Spindle function 2 0100 0100 0100 0100 0100 0100 0100 0100
SP035 SFNC3 Spindle function 3 1600 1600 1600 1600 1600 1600 1600 1600
SP036 SFNC4 Spindle function 4 0000 0000 0000 0000 0000 0000 0000 0000
SP037 JL Load inertia scale 100 100 100 100 100 100 100 100
SP038 FHz1 Notch filter frequency 1 00000000
: ::::::::
SP046 FHz2 Notch filter frequency 2 00000000
SP047 EC Inductive voltage compensation gain 100 100 100 100 100 100 100 100
SP048 LMC1 Lost motion compensation 1 00000000
SP049 FFC Acceleration rate feed forward gain 00000000
SP050 TOF Torque offset 00000000
SP051 DFBT Dual feed back control time constant 00000000
SP052 DFBN Dual feedback control non-sensitive band 00000000
SP053 ODS
Excessive error detection width
(non-interpolation mode)
800 800 600 600 600 600 600 600
SP054 ORE Overrun detection width in closed loop control 00000000
SP055 EMGx Max. gate off delay time after emergency stop 20000 20000 20000 20000 20000 20000 20000 20000
SP056 EMGt Deceleration time constant at emergency stop 300 300 300 300 300 300 300 300
SP057 GRA1 Spindle side gear ratio 1 11111111
SP058 GRA2 Spindle side gear ratio 2 11111111
SP059 GRA3 Spindle side gear ratio 3 11111111
SP060 GRA4 Spindle side gear ratio 4 11111111
SP061 GRB1 Motor side gear ratio 1 11111111
SP062 GRB2 Motor side gear ratio 2 11111111
SP063 GRB3 Motor side gear ratio 3 11111111
SP064 GRB4 Motor side gear ratio 4 11111111
SP065 TLM1 Torque limit 1 10 10 10 10 10 10 10 10
SP066 TLM2 Torque limit 2 10 10 10 10 10 10 10 10
SP067 TLM3 Torque limit 3 10 10 10 10 10 10 10 10
SP068 TLM4 Torque limit 4 10 10 10 10 10 10 10 10
SP069 PCMP Phase alignment completion width 875 875 875 875 875 875 875 875
SP070 KDDT Phase alignment deceleration rate scale 00000000
SP071 DIQM
Variable current limit during deceleration,
lower limit value
60 60 60 60 60 60 60 60
SP072 DIQN
Variable current limit during deceleration,
break point speed
1800 1800 1800 1800 1800 1800 1800 1800
SP073 VGVN Variable speed gain target value 00000000
SP074 VGVS Variable speed gain change start speed 00000000
SP075 DWSH
Slip compensation scale during regeneration high-
speed coil
00000000