















4 - 19
MDS-D2/DH2 Series Instruction Manual
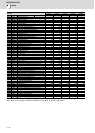
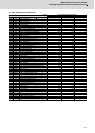
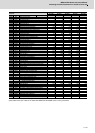
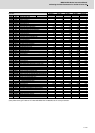
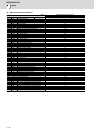
4.2 Setting the Initial Parameters for the Servo Drive Unit
(2) 200V Standard motor HP Series
Motor
Parameter
200V Standard motor HP Series
HP54 HP104 HP154 HP224 HP204
No. Abbrev. Details MDS-D2-V1/V2- 40 40 80 80 80
SV001 PC1 Motor side gear ratio -----
SV002 PC2 Machine side gear ratio -----
SV003 PGN1 Position loop gain 1 33 33 33 33 33
SV004 PGN2 Position loop gain 2 00000
SV005 VGN1 Speed loop gain 1 100 100 100 60 100
SV006 VGN2 Speed loop gain 2 00000
SV007 VIL Speed loop delay compensation 00000
SV008 VIA Speed loop lead compensation 1364 1364 1364 1364 1364
SV009 IQA Current loop q axis lead compensation 8192 4096 6144 3072 3072
SV010 IDA Current loop d axis lead compensation 8192 4096 6144 3072 3072
SV011 IQG Current loop q axis gain 1280 768 1536 1024 1024
SV012 IDG Current loop d axis gain 1280 768 1536 1024 1024
SV013 ILMT Current limit value 800 800 800 800 800
SV014 ILMTsp Current limit value in special control 800 800 800 800 800
SV015 FFC Acceleration rate feed forward gain 00000
SV016 LMC1 Lost motion compensation 1 00000
SV017 SPEC1 Servo specification 1 1000 1000 1000 1000 1000
SV018 PIT Ball screw pitch/Magnetic pole pitch -----
SV019 RNG1 Sub side encoder resolution -----
SV020 RNG2 Main side encoder resolution -----
SV021 OLT Overload detection time constant 60 60 60 60 60
SV022 OLL Overload detection level 150 150 150 150 150
SV023 OD1 Excessive error detection width during servo ON 66666
SV024 INP In-position detection width 50 50 50 50 50
SV025 MTYP Motor/Encoder type 2211 2212 2213 221B 2214
SV026 OD2 Excessive error detection width during servo OFF 66666
SV027 SSF1 Servo function 1 4000 4000 4000 4000 4000
: :::::
SV031 OVS1 Overshooting compensation 1 00000
SV032 TOF Torque offset 00000
SV033 SSF2 Servo function 2 0000 0000 0000 0000 0000
SV034 SSF3 Servo function 3 0000 0000 0000 0000 0000
SV035 SSF4 Servo function 4 0000 0000 0000 0000 0000
SV036 PTYP Power supply type/ Regenerative resistor type 0000 0000 0000 0000 0000
: :::::
SV045 TRUB Friction torque 00000
SV046 FHz2 Notch filter frequency 2 00000
SV047 EC Inductive voltage compensation gain 100 100 100 100 100
SV048 EMGrt Vertical axis drop prevention time 00000
SV049 PGN1sp Position loop gain 1 in spindle synchronous control 15 15 15 15 15
: :::::
SV064 DA2MPY D/A output ch2 output scale 00000
SV065 TLC Machine end compensation gain 00000
(System parameter area)
SV073 FEEDout Specified speed output speed 00000
(System parameter area)
SV081 SPEC2 Servo specification 2 0200 0200 0200 0200 0200
SV082 SSF5 Servo function 5 0000 0000 0000 0000 0000
SV083 SSF6 Servo function 6 0000 0000 0000 0000 0000
SV084 SSF7 Servo function 7 0000 0000 0000 0000 0000
SV085 LMCk Lost motion compensation 3 spring constant 00000
: :::::
SV093 00000
SV094 MPV Magnetic pole position error detection speed 10 10 10 10 10
SV095 ZUPD Vertical axis pull up distance 00000
: :::::
SV256 00000