



















5-17
1
Before Using the Products
2
Preparation
3
Connection
4
Setup
5
Adjustment
6
When in Trouble
7
Supplement
5
4. Manual Gain Tuning (Basic)
Adjustment
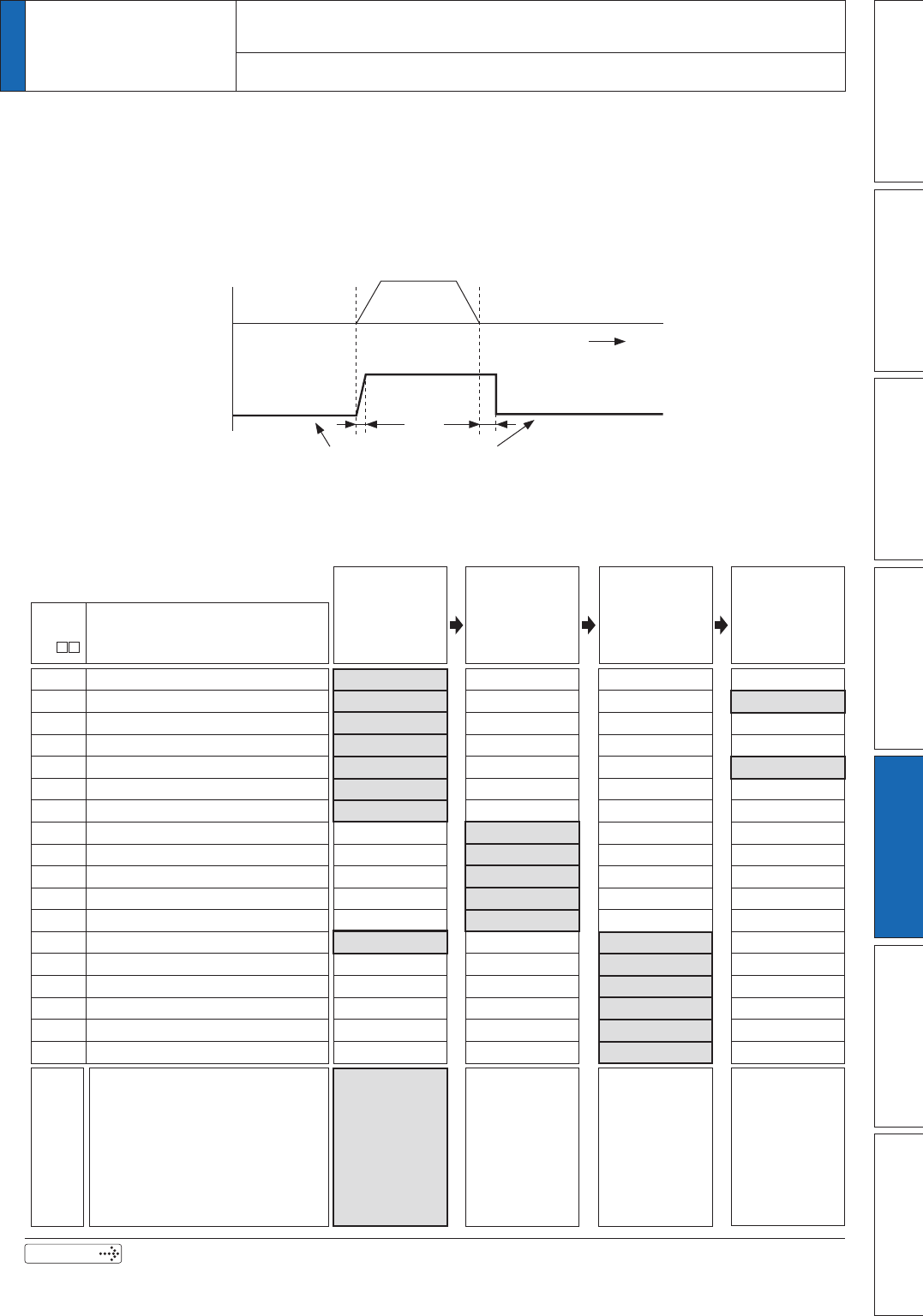
Gain Switching Function
%\VHOHFWLQJDSSURSULDWHJDLQEDVHGRQLQWHUQDOGDWDRUH[WHUQDOVLJQDOWKHIROORZLQJHI-
IHFWVFDQEHREWDLQHG
'HFUHDVHWKHJDLQDWWKHWLPHRIVWRSSDJHVHUYRORFNWRUHGXFHYLEUDWLRQ
,QFUHDVHWKHJDLQDWWKHWLPHRIVWRSSDJHVHWWLQJWRVKRUWHQWKHVHWWOLQJWLPH
,QFUHDVHWKHJDLQGXULQJRSHUDWLRQWRLPSURYHFRPPDQGFRPSOLDQFH
%DVHGRQFRQGLWLRQRIWKHHTXLSPHQWFKDQJHWKHJDLQZLWKH[WHUQDOVLJQDO
<Example>
)ROORZLQJLVWKHH[DPSOHZKHQ\RXZDQWWRUHGXFHWKHQRLVHDWPRWRULQVWDOO6HUYR/RFN
E\VHWWLQJXSWRORZHUJDLQDIWHUWKHPRWRUVWRSV
0DNHDGMXVWPHQWUHIHUULQJWRWKHEDVLFJDLQSDUDPHWHUVHWXSWDEOH3DVZHOO
1st gain of position loop
1st gain of velocity loop
1st time constant of velocity integration
1st filter of velocity detection
1st time constant of torque filter
Velocity feed forward
Filter of velocity feed forward
2nd gain of position loop
2nd gain of velocity loop
2nd time constant of velocity integration
2nd filter of velocity detection
2nd time constant of torque filter time
Action setup of 2nd gain
1st mode of control switching
1st delay time of control switching
1st level of control switching
1st hysteresis of control switching
Switching time of position gain
Inertia ration
Execute manual
gain-tuning
without gain
switching
Set up the same
value as Pr1.05
to 1.09 (2nd gain)
to Pr1.00 to 1.04
(1st gain)
Set up Pr1.14 to
1.19
(Gain switching
condition)
Adjust Pr1.01
and 1.04 at
stopping
(1st gain)
Title of parameter
1.00
1.01
1.02
1.03
1.04
1.10
1.11
1.05
1.06
1.07
1.08
1.09
1.14
1.15
1.16
1.17
1.18
1.19
630
350
160
0
65
300
50
0
630
350
160
0
65
1
7
30
0
0
0
270
84
0.04
(QWHUWKHNQRZQ
value from load
calculation
0HDVXUHWKH
inertia ratio by
executing nor
mal auto-gain
tuning
'HIDXOWLV
Parameter
No.
(Pr )
Suppress the vibration by lowering the gain.
Stop
(Servo-Lock)
Low gain
(1st gain)
Low gain
(1st gain)
High gain
(2nd gain)
1ms 2ms
Stop
(Servo-Lock)
Run Time
Command speed
Action
Status
Gain
Related page
3´'HWDLOVRISDUDPHWHUµ