



















4-37
1
Before Using the Products
2
Preparation
3
Connection
4
Setup
5
Adjustment
6
When in Trouble
7
Supplement
1. Details of parameter
[Class 4] I/F monitor setting
Pr4.16/Pr4.18 Type of monitor Unit
Output gain for setting
Pr4.17/Pr4.19 = 0
0 Motor speed r/min 500
1 Positional command speed
*
3
r/min 500
2 Internal positional command speed
*
3
r/min 500
3 Velocity control command r/min 500
4 Torque command % 33
5 &RPPDQGSRVLWLRQDOGHYLDWLRQ
*
4
SXOVH&RPPDQGXQLW 3000
6 (QFRGHUSRVLWLRQDOGHYLDWLRQ
*
4
SXOVH(QFRGHUXQLW 3000
7 )XOOFORVHGGHYLDWLRQ
*
4
SXOVH([WHUQDOVFDOHXQLW 3000
8 +\EULGGHYLDWLRQ SXOVH&RPPDQGXQLW 3000
9 9ROWDJHDFURVV31 V80
10 5HJHQHUDWLYHORDGIDFWRU %33
11 2YHUORDGIDFWRU %33
12 3RVLWLYHGLUHFWLRQWRUTXHOLPLW %33
13 1HJDWLYHGLUHFWLRQWRUTXHOLPLW %33
14 6SHHGOLPLWYDOXH r/min 500
15 Inertia ratio % 500
16 $QDORJLQSXW
*
2
V1
17 $QDORJLQSXW
*
2
V1
18 $QDORJLQSXW
*
2
V1
19 Encoder temperature
*
5
ʝ 10
20 'ULYHUWHPSHUDWXUH ʝ 10
21 Encoder single-turn data
*
1
SXOVH(QFRGHUXQLW 110000
*
7KHHQFRGHUURWDWLRQGDWD&&:LVDOZD\VSRVLWLYHYDOXHUHJDUGOHVVRI3U5RWDWLRQDOGLUHFWLRQVHWXS
7KHGLUHFWLRQRIRWKHUPRQLWRUGDWDEDVLFDOO\IROORZV3U5RWDWLRQDOGLUHFWLRQVHWXS
*
$QDORJLQSXWVDQGDOZD\VRXWSXWWHUPLQDOYROWDJHUHJDUGOHVVRIXVDJHRIDQDORJLQSXWIXQFWLRQ
2QO\IRUSRVLWLRQFRQWUROW\SHLVQRWSURYLGHGZLWKDQDORJLQSXWV
*
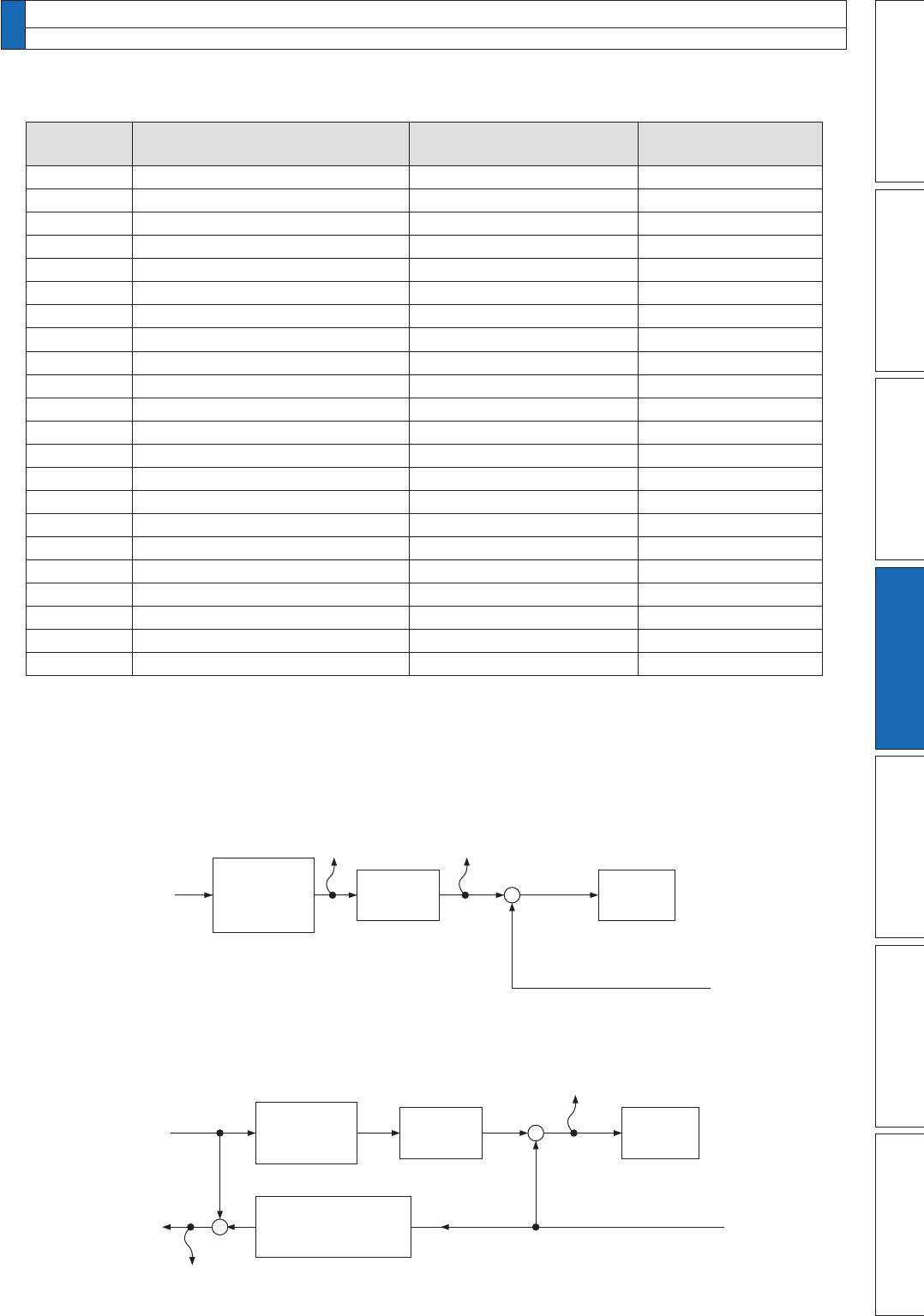
)RUWKHFRPPDQGSXOVHLQSXWWKHVSHHGEHIRUHWKHFRPPDQGÀOWHUVPRRWKLQJ),5ÀOWHULVGHÀQHGDVSRVLWLRQDO
FRPPDQGVSHHGDQGVSHHGDIWHUÀOWHULVGHÀQHGDVLQWHUQDOFRPPDQGVSHHG
Command
division/
multiplication
process
Positional
command
filter
Position
control
Positional command
speed [r/min]
Command
pulse input
Internal position
command speed [r/min]
+
–
Encoder feedback/
external scale feedback
*
&RPPDQGSRVLWLRQDOGHYLDWLRQLVWKHGHYLDWLRQZLWKUHVSHFWWRWKHFRPPDQGSXOVHLQSXWDQGWKHHQFRGHUSRVLWLRQDO
GHYLDWLRQIXOOFORVHGSRVLWLRQDOGHYLDWLRQLVWKHGHYLDWLRQDWWKHLQSXWVHFWLRQRIWKHSRVLWLRQDOFRQWURODVGHVFULEHGLQ
WKHÀJXUHEHORZ
Command
division/
multiplication
Command
pulse input
+
+
–
–
Encoder feedback/
external scale feedback
Positional command deviation (command unit)
Encoder positional deviation (encoder unit)
/ Full-closed deviation (external unit)
Command
division/multiplication
reverse conversion
Positional
command
filter
Positional
control
*
7HPSHUDWXUHLQIRUPDWLRQIURPWKHHQFRGHULQFOXGHVYDOXHRQO\ZKHQLWLVDELWLQFUHPHQWDOHQFRGHU2WKHUZLVH
WKHYDOXHLVDOZD\V