


















5-4
5
2. Real-Time Auto-Gain Tuning
Adjustment
Basic
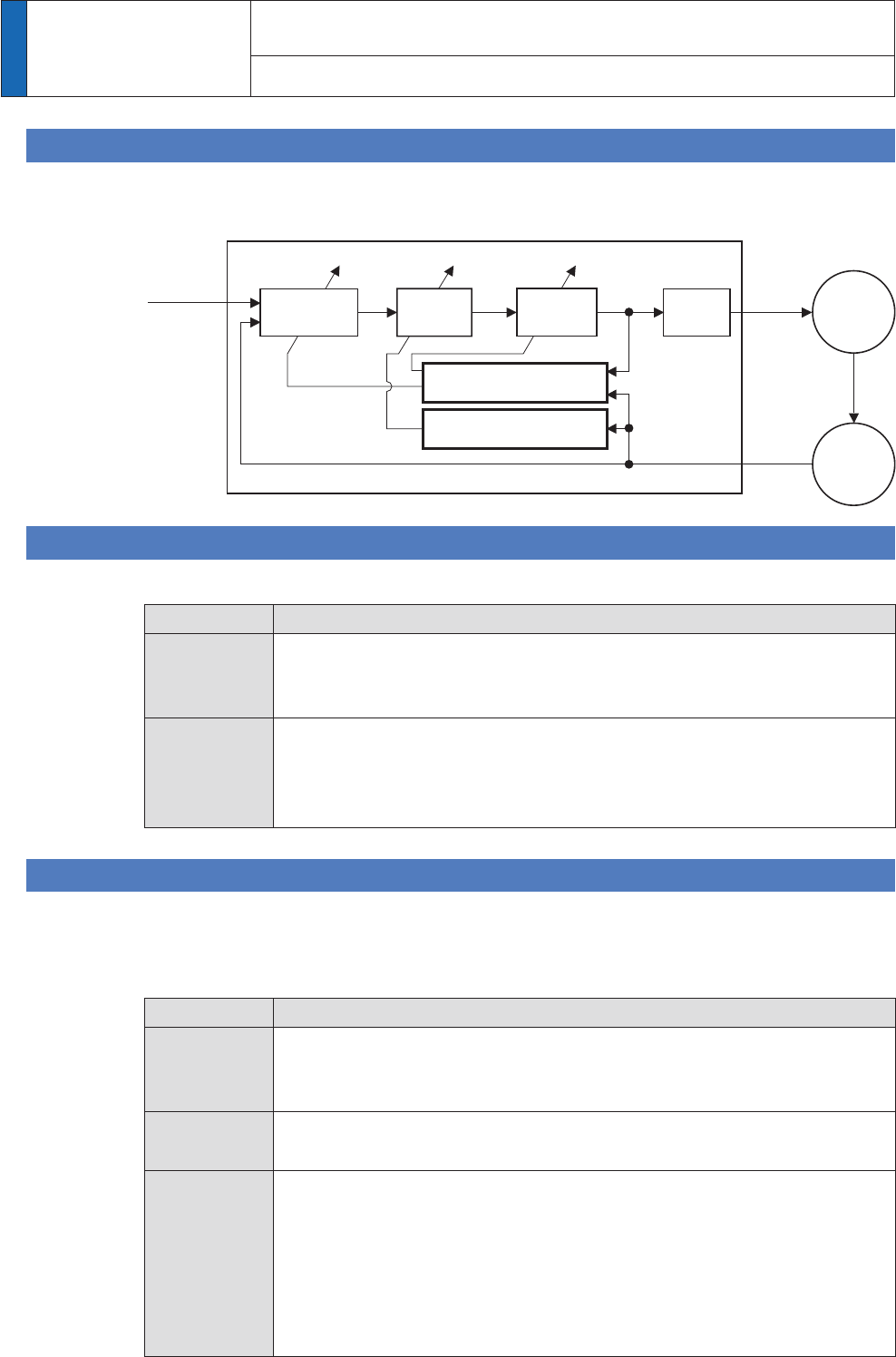
Outline
7KH V\VWHPHVWLPDWHV WKHORDG FKDUDFWHULVWLFV LQUHDO WLPHDQG DXWRPDWLFDOO\ SHUIRUPV
EDVLFJDLQVHWWLQJDQGIULFWLRQFRPSHQVDWLRQE\UHIHUULQJWRVWLIIQHVVSDUDPHWHU
Applicable Range
5HDOWLPHDXWRJDLQWXQLQJLVDSSOLFDEOHWRDOOFRQWUROPRGHV
Real-time auto-tuning condition
Control Mode
6SHFLÀFUHDOWLPHDXWRWXQLQJPRGHLVVHOHFWHGDFFRUGLQJWRWKHFXUUHQWO\
DFWLYHFRQWURO PRGH)RU GHWDLOVUHIHU WRWKH GHVFULSWLRQRI 3U5HDO
time auto-tuning setup.
Others
6KRXOGEHLQVHUYRRQFRQGLWLRQ
,QSXWVLJQDOVVXFKDV WKHGHYLDWLRQFRXQWHUFOHDUDQGFRPPDQG LQSXW
LQKLELWDQGSDUDPHWHUVH[FHSWIRUFRQWUROVVXFKDVWRUTXHOLPLWVHWXSDUH
FRUUHFWO\VHWDVVXULQJWKDWWKHPRWRUFDQUXQVPRRWKO\
Caution
5HDOWLPHDXWRJDLQWXQLQJPD\QRWEHH[HFXWHGSURSHUO\XQGHUWKHFRQGLWLRQVGHVFULEHG
in the table below. 8QGHUWKHVHFRQGLWLRQVFKDQJHWKHORDGFRQGLWLRQRURSHUDWLRQSDW-
WHUQRUVWDUWPDQXDOJDLQWXQLQJVHH3
Conditions which obstruct real-time auto-gain tuning action
Load inertia
7KHORDGLVWRRVPDOORUODUJHFRPSDUHGWRWKHURWRULQHUWLDOHVVWKDQ
WLPHVRUPRUHWKDQWLPHV
7KHORDGLQHUWLDFKDQJHVWRRTXLFNO\
Load
7KHPDFKLQHVWLIIQHVVLVH[WUHPHO\ORZ
1RQOLQHDUFKDUDFWHULVWLFVVXFKDVEDFNODVKH[LVW
Action
pattern
7KHPRWRULVUXQQLQJFRQWLQXRXVO\DWORZVSHHGRI>UPLQ@RUORZHU
$FFHOHUDWLRQGHFHOHUDWLRQLVVORZ>UPLQ@SHU>V@RUORZ
$FFHOHUDWLRQGHFHOHUDWLRQWRUTXH LV VPDOOHU WKDQ XQEDODQFHGZHLJKWHG
YLVFRXVIULFWLRQWRUTXH
:KHQWKHVSHHGFRQGLWLRQRI>UPLQ@RUPRUHDQGDFFHOHUDWLRQ
GHFHOHUDWLRQFRQGLWLRQRI>UPLQ@SHU >V@DUHQRWPDLQWDLQHGIRU
>PV@
Position/
Velocity
command
Position/
Velocity
control
Servo driver
Load characteristic
estimation
Resonant frequency
measurement
Torque
command
Generation
Notch
filter
current
control
Basic gain automatic
setting
Friction torque
compensation
Adaptive
process
Torque
command
Motor
current
Motor
speed
Motor
Encoder