


















4-63
1
Before Using the Products
2
Preparation
3
Connection
4
Setup
5
Adjustment
6
When in Trouble
7
Supplement
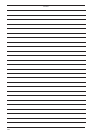
Input pulse frequency
(pps)
Motor rotational speed
(r/min)
Pr0.08
17-bit 20-bit
2M 3000
2
17
40000
2
20
40000
500K 3000
2
17
10000
2
20
10000
250K 3000
2
17
5000
2
20
5000
100K 3000
2
17
2000
2
20
2000
500K 1500
2
17
20000
2
20
20000
Note
Caution
:KHQVHWWLQJ3UDQGHQFRGHUUHVROXWLRQLVDXWRPDWLFDOO\VHWXSDVQXPHUDWRUV)RU
IXOOFORVHGFRQWUROOLQJVHWWLQJRI3ULVLJQRUHGDQGVHWWLQJVRI3UDQG3UDUH
DOZD\VDSSOLHG
0D[LQSXWSXOVHIUHTXHQF\YDULHVGHSHQGLQJRQLQSXWWHUPLQDOV
7KHGHVLUHGVHWWLQJFDQEHGHWHUPLQHGE\VHOHFWLQJYDOXHRIQXPHUDWRUDQGGHQRPLQD-
WRURIHOHFWURQLFJHDU+RZHYHUDQH[FHVVLYHO\KLJKGLYLVLRQRUPXOWLSOLFDWLRQUDWLRFDQ-
QRWJXDUDQWHHWKHRSHUDWLRQ7KHUDWLRVKRXOGEHLQDUDQJHEHWZHHQDQG
([FHVVLYHO\KLJKPXOWLSOLFDWLRQ UDWLRZLOOFDXVH(UU FRPPDQGSXOVHPXOWLSOLFDWLRQ
HUURUSURWHFWLRQGXHWRYDU\LQJFRPPDQGSXOVHLQSXWRUQRLVHVHYHQLIWKHRWKHUVHW-
WLQJVDUHZLWKLQWKHVSHFLÀHGUDQJH
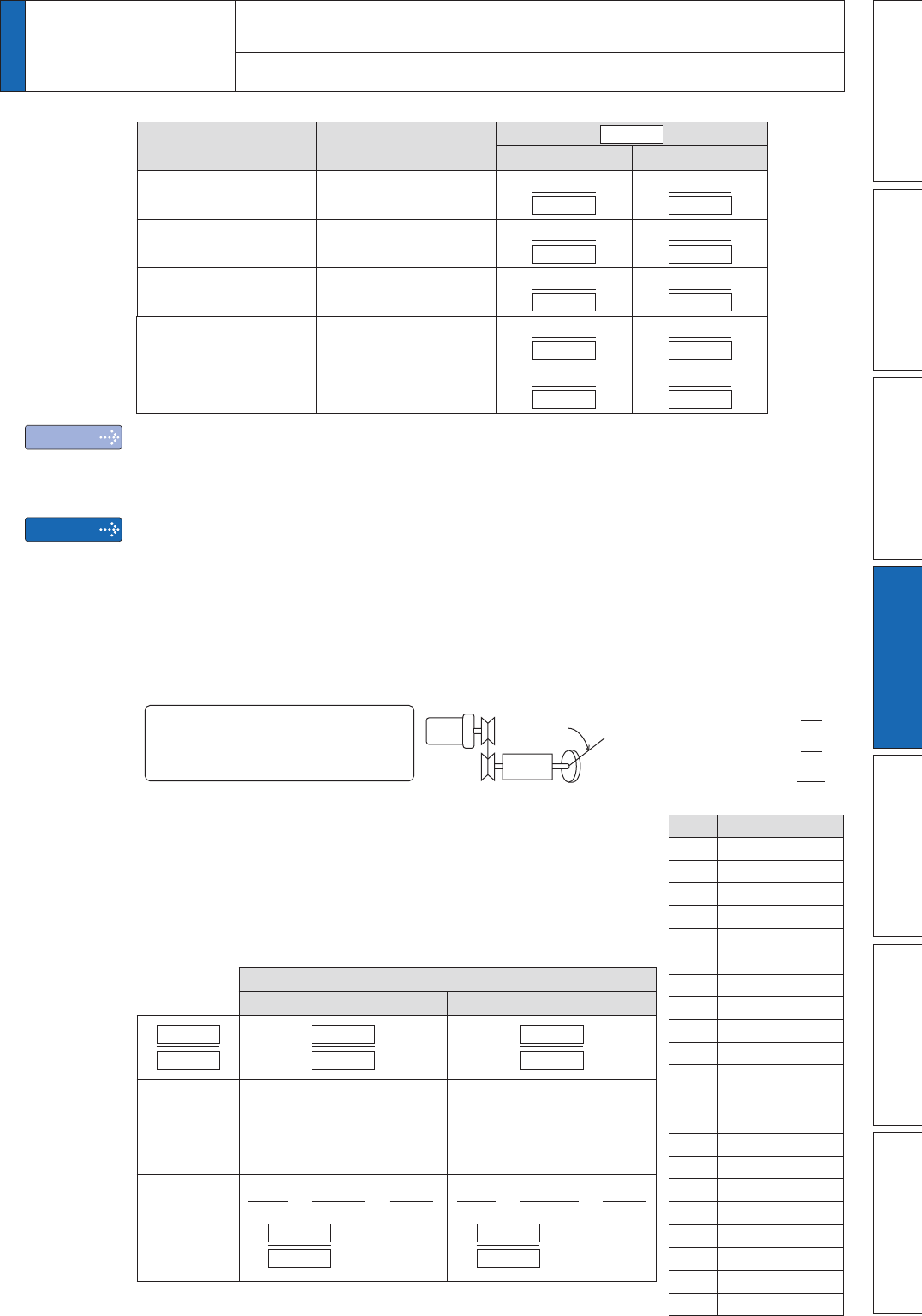
Relation between the motor
rotational speed and input
pulse counts
0
Plle rato
ear rato
otal reto rato
ear
0
:KHQVHWWLQJWKH FRPPDQG GLYLVLRQDQGPXOWLSOLFDWLRQUDWLR
DVQXPHUDWRUGHQRPLQDWRUH[SUHVVLWDV3U3U ZLWK
Pr0.08 = 0. )RUIXOO FORVHGFRQWUROOLQJVHWWLQJ RI3ULV LJ-
QRUHGDQGVHWWLQJVRI3UDQG3UDUHDOZD\VDSSOLHG
HJ :KHQ\RXZDQWWRURWDWHWKHPRWRUE\ZLWKWKHORDG
of total reduction ratio of 18/365.
Encoder
17-bit 20-bit
Pr0.09
Pr0.10
5840
108
5840
67500
Command
pulse
To rotate the output shaft by
HQWHUWKHFRPPDQGRI
13
SXOVHVIURPWKH
host controller.
To rotate the output shaft by
HQWHUWKHFRPPDQGRI
10000 pulses from the host
controller.
+RZWR
determine
parameter
365
18
ð
17
2
13
5840
108
365
18
ð
20
10000
5840
67500
5HIHUWR3´6HWXSRIFRPPDQGGLYLVLRQDQGPXOWLSOLFDWLRQUDWLR
HOHFWURQLFJHDUUDWLRµRI6XSSOHPHQW
4
2.Trial Run (JOG run)
Setup
Setup of Motor Rotational Speed and Input Pulse Frequency
2
n
Decimal figures
2
0
1
2
1
2
2
2
4
2
3
8
2
4
16
2
5
32
2
6
64
2
7
128
2
8
256
2
9
512
2
10
1024
2
11
2048
2
12
4096
2
13
8192
2
14
16384
2
15
32768
2
16
65536
2
17
131072
2
18
262144
2
19
524288
2
20
1048576