



















2-84
Note
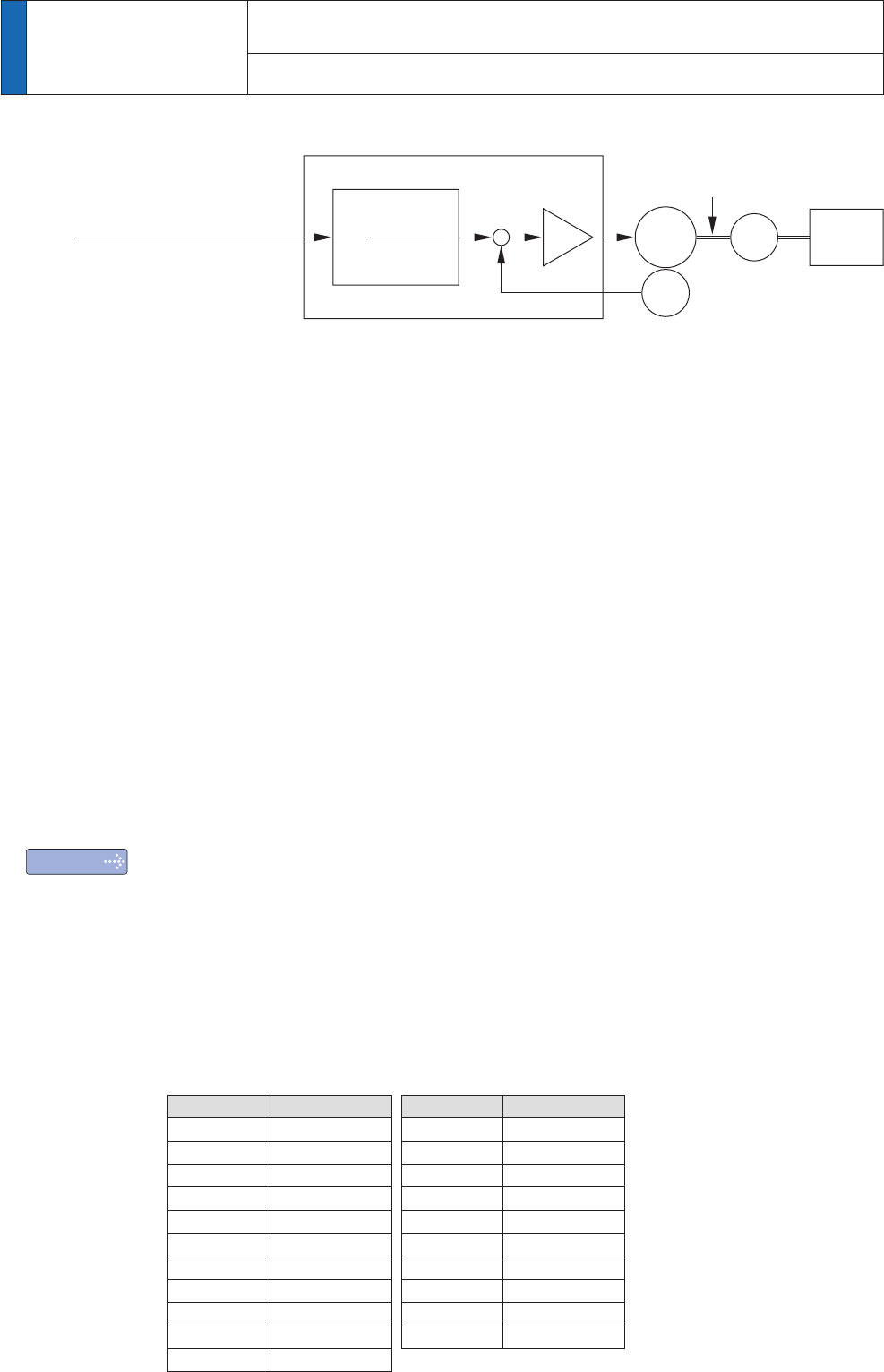
Here we take a ball screw drive as an example of machine.
A travel distance of a ball screw M [mm] corresponding to travel command P1 [P], can be
described by the following formula (1) by making the lead of ball screw as L [mm]
M = P1 x (D/E) x (1/R) x L .................. (1)
WKHUHIRUH SRVLWLRQUHVROXWLRQ WUDYHO GLVWDQFH¨0 SHU RQHFRPPDQG SXOVH ZLOO EHGH-
scribed by the formula (2)
¨0 '([5[/
modifying the above formula (2), electronic gear ratio can be found in the formula (3).
' ¨0[([5[/
Actual traveling velocity of ball screw, V[mm/s] can be described by the formula (4) and
the motor rotational speed, N at that time can be described by the formula (5).
V = F x (D/E) x (1/R) x L ..................... (4)
N = F x (D/E) x 60 ............................... (5)
modifying the above formula (5), electronic gear ratio can be found in the formula (6).
D = (N x E)/ (F x 60) ........................... (6)
0DNHDSRVLWLRQUHVROXWLRQ¨0DVDSSUR[WRRIWKHPDFKLQHSRVLWLRQLQJDF-
FXUDF\¨
ў
, considering a mechanical error.
2) Set up Pr0.09 and Pr0.10 to any values between 1 to 2
30
.
3) The desired setting can be determined by selecting value of numerator and denomina-
tor of electronic gear. However, an excessively high division or multiplication ratio can-
not guarantee the operation. The ratio should be in a range between 1/1000 and 1000.
Excessively high multiplication ratio will cause Err27.2 (command pulse multiplication
error protection) due to varying command pulse input or noises, even if the other set-
WLQJVDUHZLWKLQWKHVSHFLÀHGUDQJH
4)
2
n
Decimal 2
n
Decimal
2
0
12
11
2048
2
1
22
12
4096
2
2
42
13
8192
2
3
82
14
16384
2
4
16 2
15
32768
2
5
32 2
16
65536
2
6
64 2
17
131072
2
7
128 2
18
262144
2
8
256 2
19
524288
2
9
512 2
20
1048576
2
10
1024
Pulse train position
command
Travel distance : P1 [P]
Traveling speed : F [PPS]
Electronic gear ratio
Driver
D=
Pr0.09
Pr0.10
Motor
Encoder
Gear
Machine
Rotational speed : N[r/min]
Reduction ratio : R
Encoder pulse counts : E [P/r]
* 1,048,576 (=20bit)
* 131,072 (=17bit)
Example of ball screw drive by servo motor
[ ]
+
–
2
Preparation
14.
Relation between Electronic Gear and Position Resolution or Traveling Speed
Setup of command division and
multiplication ratio (electronic gear ratio)