



















3–6
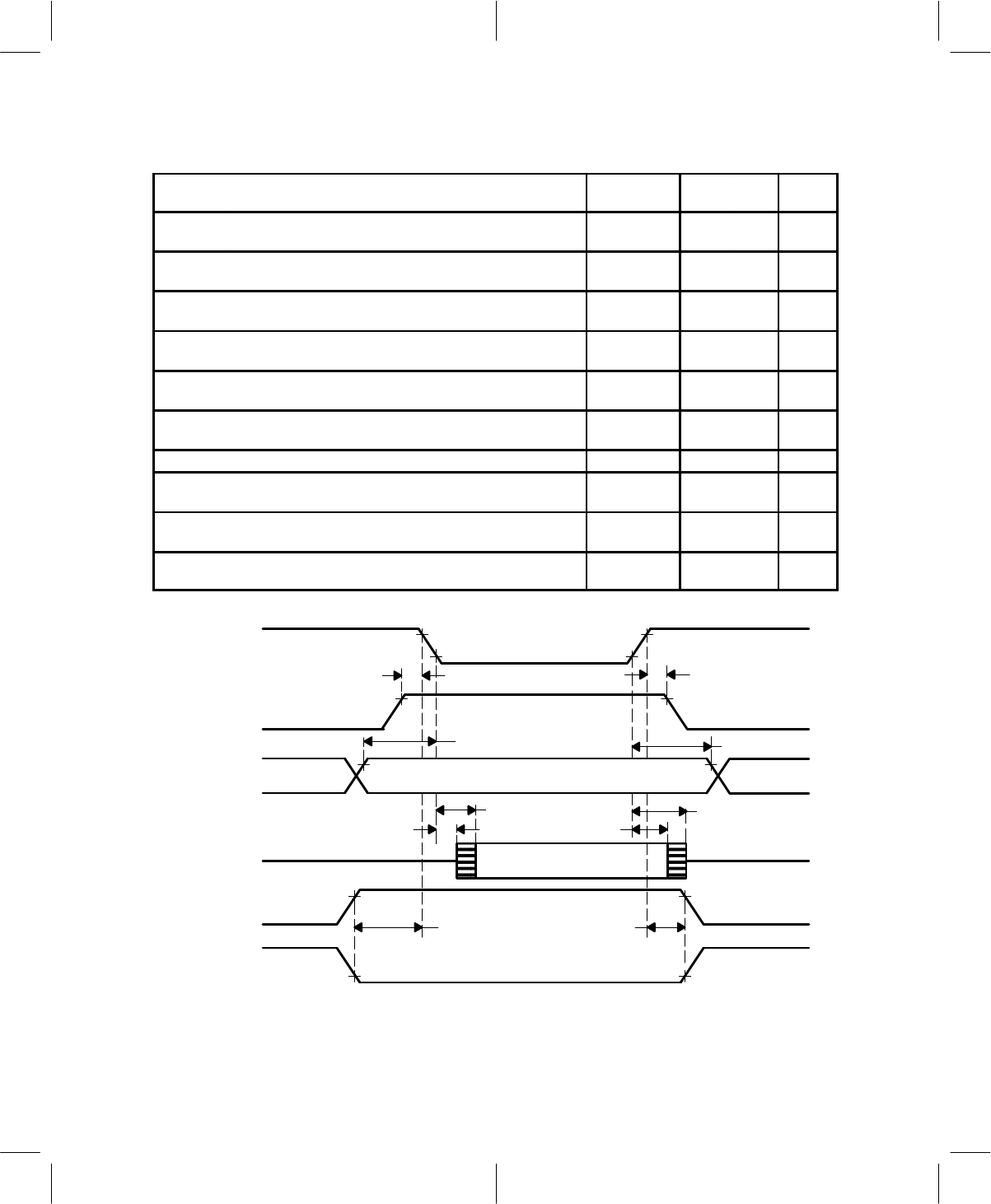
3.6 TCM4300 to Microcontroller Interface Timing Requirements (Motorola
16-Bit Read Cycle) (see Figure 3–6 and Note 4)
PARAMETER
ALTERNATE
SYMBOL
MIN MAX
UNIT
t
su(R/W)
Setup time, read/write MCRW stable before falling edge of
strobe MCDS
TRW
(SU)
0 ns
t
h(R/W)
Hold time, read/write MCRW stable after rising edge of
strobe MCDS
TRW
(HO)
10 ns
t
su(RA)
Setup time, read address MCA stable before falling edge of
strobe MCDS
TRA
(SU)
0 ns
t
h(RA)
Hold time, read address MCA stable after rising edge of
strobe MCDS
TRA
(HO)
10 ns
t
en(RD)
Enable time, read data on falling edge of strobe MCDS to
TCM4300 driving data bus MCD
TRD
(EN)
10 ns
t
v(RD)
Valid time, read data on falling edge of strobe MCDS to
valid data MCD
TRD
(DV)
50 ns
t
inv
Data (MCD) invalid after rising edge of strobe MCDS TRD
(INV)
10 ns
t
dis(RD)
Disable time, read data. TCM4300 releases MCD data bus
after rising edge of strobe MCDS
TRD
(DIS)
28 ns
t
h(CS)
Hold time, chip select MCCSH and MCCSL stable before
falling edge of strobe MCDS
TCS
(HO)
0 ns
t
su(CS)
Setup time, chip select stable MCCSH and MCCSL before
rising edge of strobe MCDS
TCS
(SU)
0 ns
NOTE 4: Timings are based upon Motorola 68HC000 (16.67 MHz) and Motorola 68302 (16 MHz).
MCA0–MCA4
MCD0–MCD7
MCDS
(see Note A)
MCRW
t
su(RA)
10%
90%
90%
10%
90%90%
t
su(R/W)
t
h(RA)
t
v(RD)
t
en(RD)
t
dis(RD)
t
inv
t
su(CS)
t
h(CS)
MCCSH
MCCSL
90% 90%
10% 10%
NOTE A: Chip selection is defined as both MCCS and MCDS active.
t
h(R/W)
Figure 3–6. Microcontroller Interface Timing Requirements
(Motorola 16-Bit Read Cycle, MTS [1:0] = 10)