



















DVP-ES2EX2/SS2/SA2/SX2/SE Operation Manual - Programming
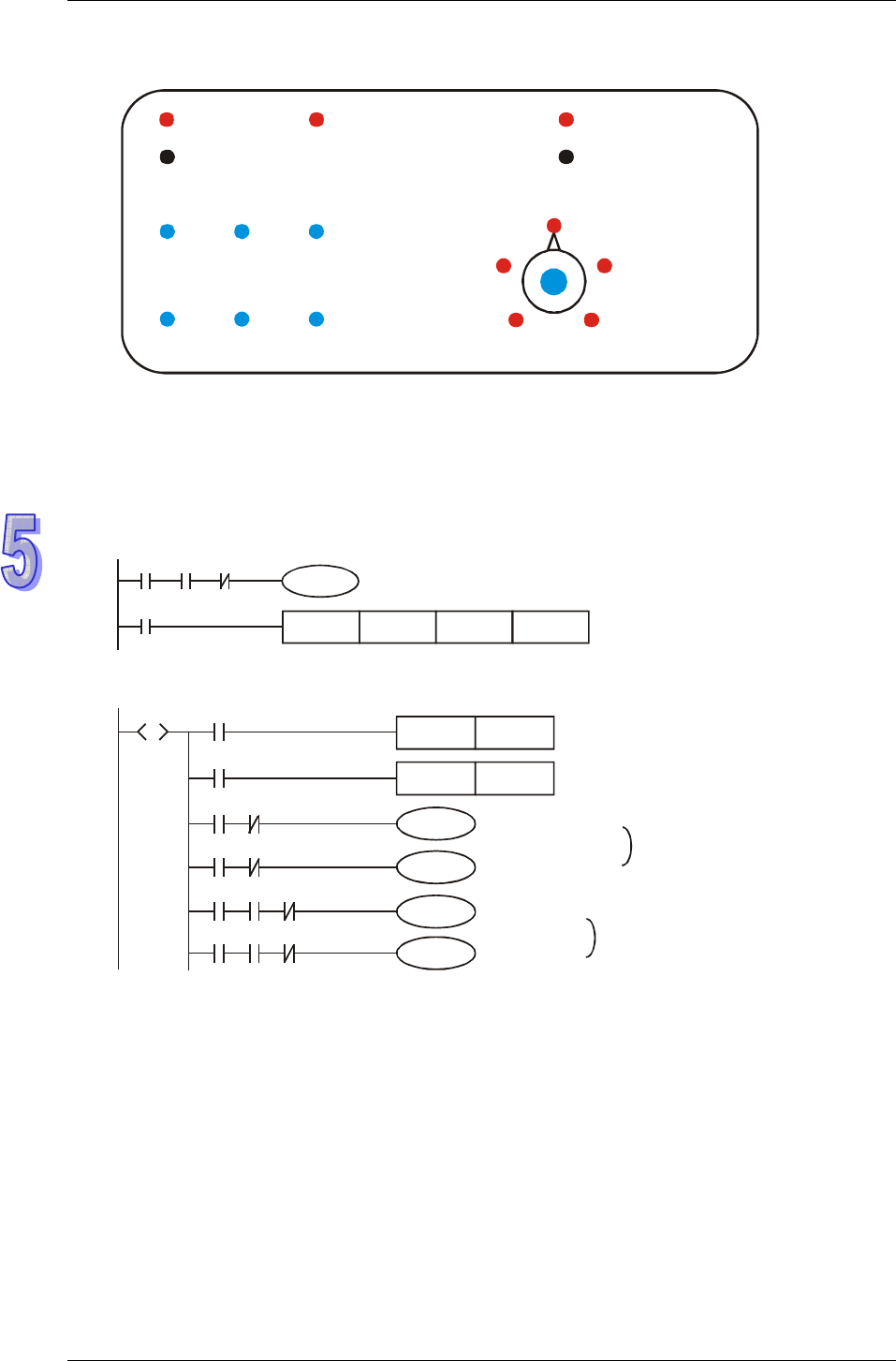
5. Control panel
X35
X36
X37
X20
X21
X22
X23
X24
X25
Step X32
One cycle
operation X33
Continuous
operation X34
Manual
operation X30
Zero return X31
Power ON
Power OFF
Zero return
Auto ON
Auto OFF
Right
Shift
Left
shift
Release
balls
Clip
balls
Descend
Ascend
a) X0: ball size sensor.
b) X1: left-limit of robot arm, X2: right-limit (big balls), X3: right-limit (small balls), X4: upper-limit
of clamp, X5: lower-limit of clamp.
c) Y0: raise robot arm, Y1: lower robot arm, Y2: shift to right, Y3: shift to left, Y4: clip balls.
6. START circuit:
M1000
IST
X30
S20 S80
X0
M1044
X1 Y4
7. Manual mode:
X2
0
SET
RST Y4
Y4
S
S0
X21
X22 Y1
Y0
X23 Y0
Y1
X24 X4
Y2
Y3
X25 X4
Y3
Y2
Clip balls
Release balls
Lower robot arm
Raise robot arm
Interlock
Shift to right
Shift to left
Y2 and Y3 interlocked and
X4 = ON is the condition
for output Y2 and Y3
5-24