



















DVP-ES2/EX2/SS2/SA2/SX2/SE Operation Manual - Programming
3-250
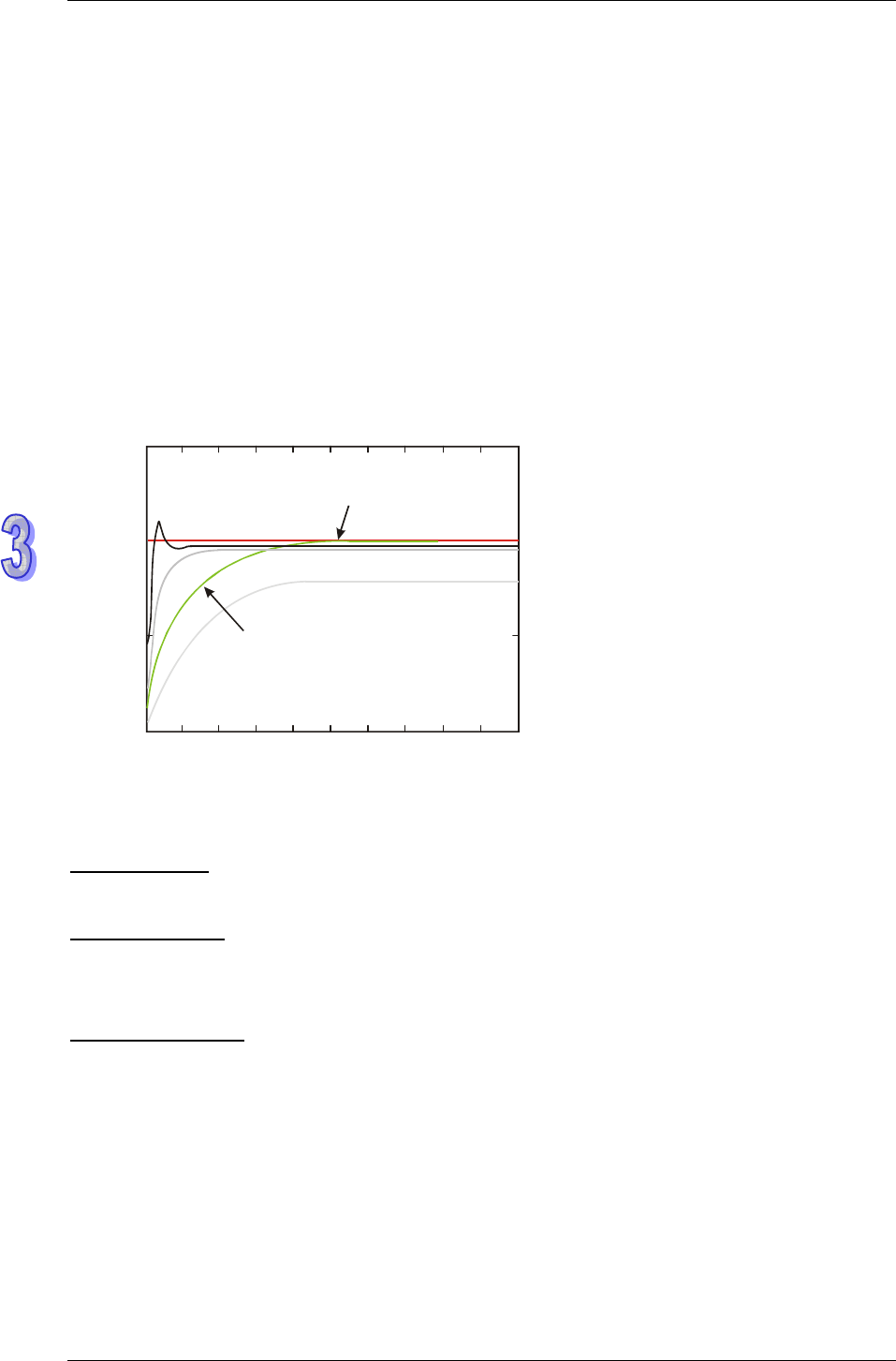
Step 2:
When K
P
is 40, response overshoot occurs, so we will not select it.
When K
P
is 20, PV response is close to SV and won’t overshoot, but transient MV will be to large
due to a fast start-up. We can put it aside and observe if there are better curves.
When K
P
is 10, PV response is close to SV and is smooth. We can consider using it.
When K
P
is 5, the response is too slow. So we won’t use it.
Step 3:
Select K
P
= 10 and increase K
I
gradually, e.g. 1, 2, 4, 8. K
I
should not be bigger than K
P
. Then,
increase K
D
as well, e.g. 0.01, 0.05, 0.1, 0.2. K
D
should not exceed 10% of K
P
. Finally we obtain the
figure of PV and SV below.
1.5
1
0.5
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
PV=SV
K =10,K =8,K =0.2
P ID
Time (sec)
Application 1:
PID instruction in pressure control system. (Use block diagram of example 1)
Control purpose:
Enabling the control system to reach the target pressure.
Control properties:
The system requires a gradual control. Therefore, the system will be overloaded or out of
control if the process progresses too fast.
Suggested solution:
Solution 1: Longer sampling time
Solution 2: Using delay instruction. See the figure below