



















46
Epsilon Ei DeviceNet Drive Reference Manual
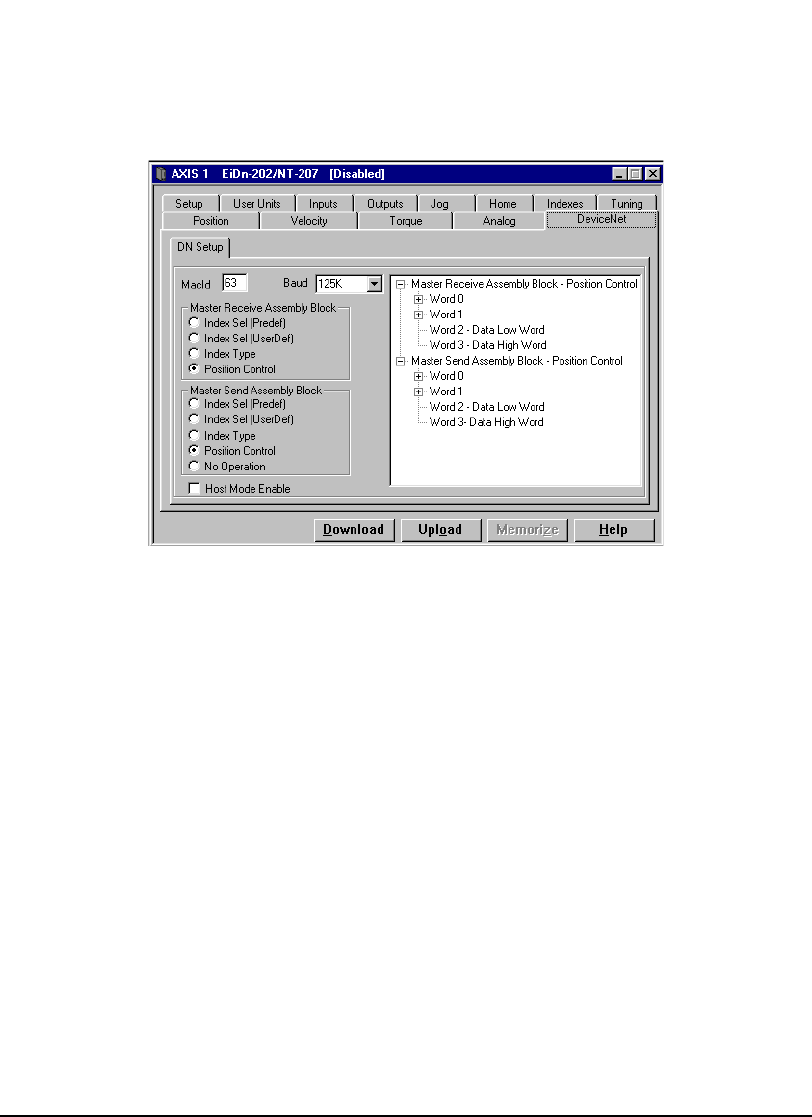
2. Enter the DN setup and set the MacID to 1 and the Baud Rate to 125K. Select
PositionControl for both Master Send Assembly Block and Master Receive Assembly
Block setups.
Figure 15: Dn Setup / Position Control
3. Download this file to the Ei-DN.
4. Proceed to “Master Configuration” on page 48 before going any farther with this
example. After configuring the master return to this point and continue.
5. Set the Command Assembly code to send a value of 50 revs to the Index Position. O:1.2
= 0x01 (parameter) and O:1.3 = 0x32 (value). After these values are in place, toggle the
Valid Data Bit (O:1.1/6).
6. Set the Command Assembly code to send a value of 1000 Revs/minute to the Index
Velocity. O:1.2 = 0x02 (parameter) and O:1.3 = 0x3E8 (value). After these values are in
place, toggle the Valid Data Bit (O:1.1/6).
7. Set the Command Assembly code to send a value of 500 revs/min
2
to the Index Accel.
O:1.2 = 0x03 (parameter) and 0:1.3 = 0x1F4 (value). After these values are in place,
toggle the Valid Data Bit (O:1.1/6).
8. Set the Command Assembly code to send a value of 500 revs/min
2
to the Index Decel.
O:1.2 = 0x04 (parameter) and O:1.3 = 0x1F4 (value). After these values are in place,
toggle the Valid Data Bit (O:1.1/6).