



















Part 6 – AT Commands for GPS-Enabled Devices Chapter 16 – AT Commands for GPS-Enabled Devices
Universal IP AT Commands Reference Guide (Document S000457K) 102
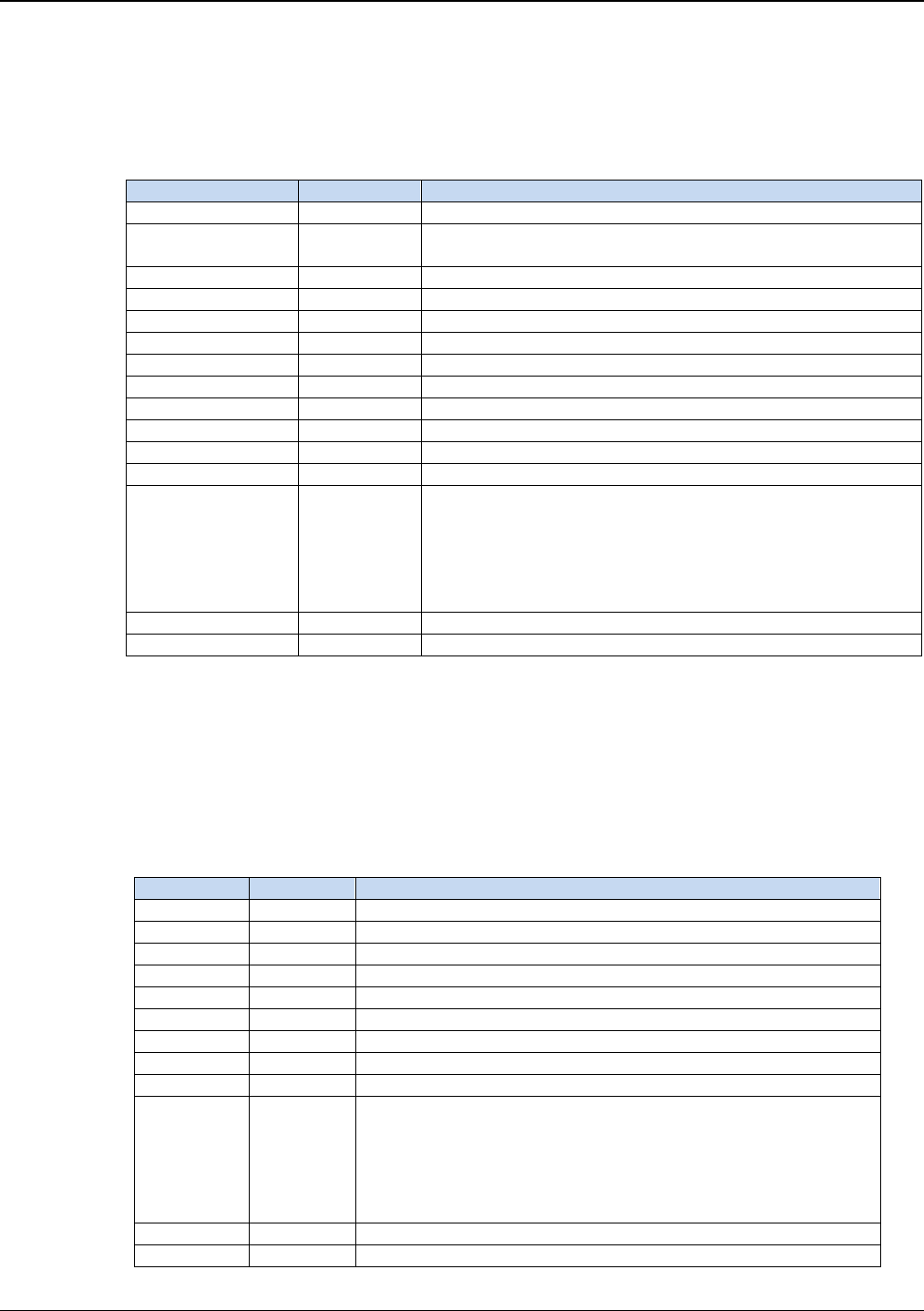
RMC – Recommended Minimum Specific GNSS Data
Time, date, position, course and speed data provided by a GNSS navigation receiver.
Structure:
$GPRMC,hhmmss.sss,A,dddmm.mmmm,a,dddmm.mmmm,a,x.x,x.x,ddmmyy,,,a*hh<CR><LF>
Example:
$GPRMC,111636.932,A,2447.0949,N,12100.5223,E,000.0,000.0,030407,,,A*61<CR><LF>
Name
Example
Description
Message ID
$GPRMC
RMC Protocol Header
UTC time
111636.932
UTC of position in hhmmss.sss format (000000.00 ~
235959.999)
Status
A
Status: 'V’ = Navigation receiver warning; ‘A’ = Data Valid
Latitude
2447.0949
Latitude in dddmm.mmmm format d
N/S indicator
N
Latitude hemisphere indicator: ‘N’ = North, ‘S’ = South
Longitude
12100.5223
Longitude in dddmm.mmmm format
E/W Indicator
E
Longitude hemisphere indicator: 'E' = East, 'W' = West
Speed over ground
000.0
Speed over ground in knots (000.0 ~ 999.9)
Course over ground
000.0
Course over ground in degrees (000.0 ~ 359.9)
UTC Date
030407
UTC date of position fix, ddmmyy format
,
Magnetic variation, degrees
,
East or West
Mode indicator
A
‘N’ = Data not valid
‘A’ = Autonomous mode
‘D’ = Differential mode
‘E’ = Estimated (dead reckoning) mode
‘M’ = Manual input mode
‘S’ = Simulator mode
Checksum
*61
<CR><LF>
<CR><LF>
End of message (termination)
VTG – Course Over Ground and Ground Speed
The Actual course and speed relative to the ground.
Structure:
GPVTG,x.x,T,,M,x.x,N,x.x,K,a*hh<CR><LF>
Example:
$GPVTG, 000.0,T,,M,000.0,N,0000.0,K,A*3D<CR><LF>
Name
Example
Description
Message ID
$GPVTG
VTG Protocol Header
Course
000.0
True course over ground in degrees (000.0 ~ 359.9)
Reference
T
True
Course
,
Measured heading (degrees)
Reference
M
Magnetic
Speed
000.0
Speed over ground in knots (000.0 ~ 999.9)
Units
N
Knots
Speed
0000.0
Speed over ground in kilometers per hour (0000.0 ~ 1800.0)
Units
K
Kilometers per hour
Mode A ‘N’ = not valid
‘A’ = Autonomous mode
‘D’ = Differential mode
‘E’ = Estimated (dead reckoning) mode
‘M’ = Manual input mode
‘S’ = Simulator mode
Checksum
*3D
<CR><LF>
<CR><LF>
End of message (termination)